Created
May 4, 2017 12:05
-
-
Save FWidm/89d103b382c87afbb8a7cc927eb9899c to your computer and use it in GitHub Desktop.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
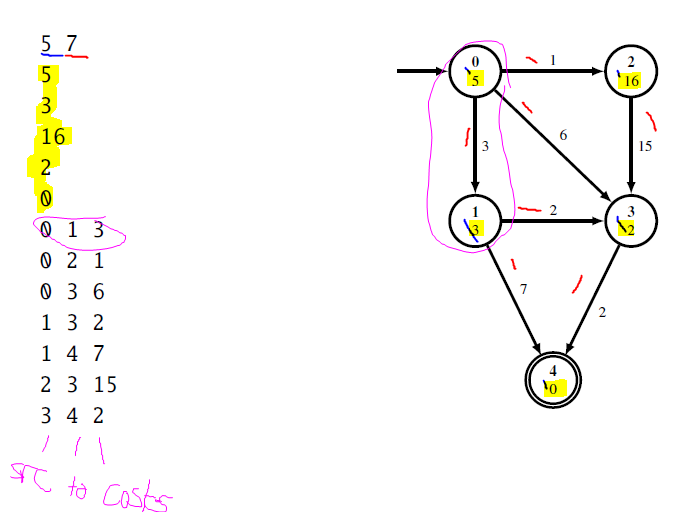
| 5 7 | |
| 5 | |
| 3 | |
| 16 | |
| 2 | |
| 0 | |
| 0 1 3 | |
| 0 2 1 | |
| 0 3 6 | |
| 1 3 2 | |
| 1 4 7 | |
| 2 3 15 | |
| 3 4 2 |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| import os | |
| from collections import deque | |
| from util.node import node | |
| from util.path import path | |
| from sortedcontainers import SortedList | |
| def read_inputfile(filename): | |
| with open(filename) as f: | |
| content = f.read().splitlines() | |
| #variables for our representation | |
| dimensions=list() # nodes,edges | |
| heuristics=list() # for node 0-n | |
| edges ={} # for node 0-n: node:[from,to,cost] | |
| nodes=list() | |
| paths=list() | |
| #splitting | |
| for i in range(0,len(content)): | |
| if 0==i: | |
| dimensions=content[i].split(" ") | |
| else: | |
| if i>0 and i<1+int(dimensions[0]): | |
| number = int(content[i]) | |
| heuristics.append(number) | |
| nodes.append(node(i-1,number,-1)) | |
| else: | |
| split=content[i].split(" ") | |
| sourceIndex=int(split[0]) | |
| destinationIndex = int(split[1]) | |
| cost=int(split[2]) | |
| paths.append(path(nodes[sourceIndex],nodes[destinationIndex],cost)) | |
| return dimensions, nodes, paths | |
| def goalCheck(currentNode,targetNode): | |
| if currentNode.id==targetNode.id: | |
| return True | |
| else: | |
| return False | |
| def getConnectedNodes(currentNode,paths): | |
| connectedNodes=list() | |
| for path in paths: | |
| if(currentNode.id == path.source.id): | |
| node=path.destination.copy() | |
| node.setParent(currentNode) | |
| node.f=path.cost+node.heuristic | |
| connectedNodes.append(node) | |
| return connectedNodes | |
| def findSolution(endNode): | |
| solution=list() | |
| node=endNode | |
| while True: | |
| solution.append(node.id) | |
| if(node.parent==None): | |
| solution.reverse() | |
| return solution | |
| node=node.parent | |
| def dfs(startingNode,targetNode,paths): | |
| closed=list() | |
| fringe=list() | |
| fringe.append(startingNode) | |
| while True: | |
| if(len(fringe)==0): | |
| return None | |
| node=fringe.pop(0) | |
| if not any(node.id == it.id for it in closed): | |
| print("Current Node= {}, Fringe={}".format(node,fringe)) | |
| if(goalCheck(node,targetNode)): | |
| return findSolution(node) #getPath method loop from the goal back to the starting node | |
| else: | |
| connectedNodes=getConnectedNodes(node,paths) | |
| fringe[:0]=connectedNodes | |
| closed.append(node) | |
| else: | |
| print("skipped node={}".format(node)) | |
| def bfs(startingNode,targetNode,paths): | |
| closed=list() | |
| fringe=list() | |
| fringe.append(startingNode) | |
| while True: | |
| if(len(fringe)==0): | |
| return None | |
| node=fringe.pop(0) | |
| if not any(node.id == it.id for it in closed): | |
| print("Current Node= {}, Fringe={}".format(node,fringe)) | |
| if(goalCheck(node,targetNode)): | |
| return findSolution(node) #getPath method loop from the goal back to the starting node | |
| else: | |
| connectedNodes=getConnectedNodes(node,paths) | |
| fringe.extend(connectedNodes) | |
| closed.append(node) | |
| else: | |
| print("skipped node={}".format(node)) | |
| def a_star(startingNode, targetNode, paths): | |
| closed=list() | |
| fringe=SortedList() | |
| fringe.append(startingNode) | |
| while True: | |
| if(len(fringe)==0): | |
| return None | |
| node=fringe.pop(0) | |
| if not any(node.id == it.id for it in closed): | |
| print("Current Node= {}, Fringe={}".format(node,fringe)) | |
| if(goalCheck(node,targetNode)): | |
| return findSolution(node) #getPath method loop from the goal back to the starting node | |
| else: | |
| connectedNodes=getConnectedNodes(node,paths) | |
| for tmpNode in connectedNodes: | |
| fringe.add(tmpNode) | |
| #fringe.extend(sorted(connectedNodes)) | |
| closed.append(node) | |
| else: | |
| print("skipped node={}".format(node)) | |
| (dimensions, nodes, paths)=read_inputfile("in/01.in") | |
| '''file: 01.in | |
| 5 7 | |
| 5 | |
| 3 | |
| 16 | |
| 2 | |
| 0 | |
| 0 1 3 | |
| 0 2 1 | |
| 0 3 6 | |
| 1 3 2 | |
| 1 4 7 | |
| 2 3 15 | |
| 3 4 2 | |
| ''' | |
| print("Got dimensions (nodes,edges) : {}".format(dimensions)) | |
| print("Got nodes: {}".format(nodes)) | |
| print("Got paths: {}".format(paths)) | |
| print("Got BFS Path: {}".format(bfs(nodes[0],nodes[-1],paths))) | |
| print("Got DFS Path: {}".format(dfs(nodes[0],nodes[-1],paths))) | |
| print("Got A* Path: {}".format(a_star(nodes[0],nodes[-1],paths))) | |
| n1=node(0,1,1) | |
| n2=node(1,2,2) | |
| list=SortedList() | |
| list.add(n2) | |
| list.add(n1) | |
| print(list) | |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| class node: | |
| def __init__(self, id, heuristic, f): | |
| self.id=id | |
| self.heuristic=heuristic | |
| self.totalCost=0 | |
| self.f=f | |
| self.parent=None | |
| def setParent(self,parent): | |
| self.parent=parent | |
| def __lt__(self, other): | |
| return self.f < other.f | |
| def __repr__(self): | |
| #return "node:[id={}, heuristic={}, totalCost={}, cost={}, parent={}]".format(self.id,self.heuristic,self.totalCost,self.cost,self.parent) | |
| if(self.parent != None): | |
| return "node:[id={}, parentId={}, f={}, heuristic={}]".format(self.id,self.parent.id,self.f, self.heuristic) | |
| else: | |
| return "node:[id={}], f={}, heuristic={}]".format(self.id,self.f, self.heuristic) | |
| def copy(self): | |
| return node(self.id,self.heuristic,self.f) |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| from util.node import node | |
| class path: | |
| def __init__(self,source,destination,cost): | |
| self.source=source | |
| self.destination=destination | |
| self.cost=cost | |
| def __repr__(self): | |
| return "path:[source={}, destination={}, cost={}]".format(self.source,self.destination,self.cost) |
Author
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
explanation of 01.in