Last active
February 18, 2022 01:24
-
-
Save azechi/3ecae7fa515ac8157370aa2a8be6d317 to your computer and use it in GitHub Desktop.
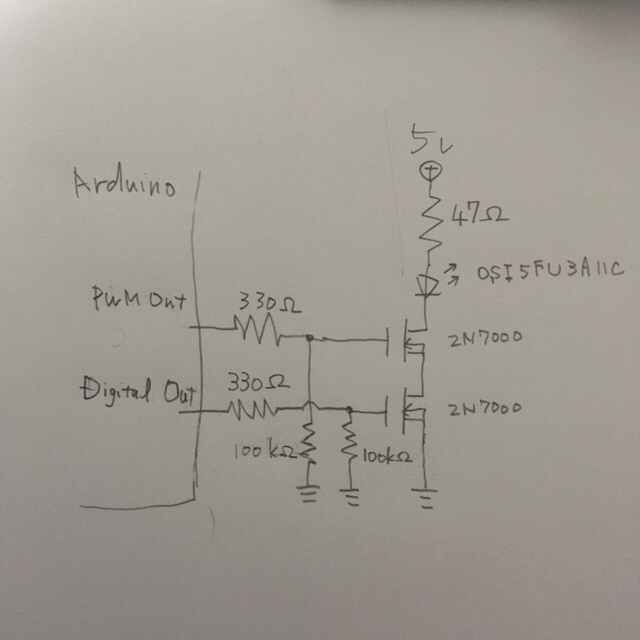
Infared remote control for AEHA format with Arduino Uno.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #include <util/atomic.h> | |
| int T = 470; | |
| void setup() { | |
| pinMode(8, OUTPUT); | |
| digitalWrite(8, LOW); | |
| pinMode(9, OUTPUT); | |
| TCCR1A = 0; | |
| TCCR1B = 0; | |
| // Compare Output Mode = "inverting mode. Set bit on compare match, clear bit at BOTTOM." | |
| TCCR1A |= _BV(COM1A1) | _BV(COM1A0); | |
| // Waveform Generation Mode = "14 Fast PWM TOP=ICR1" | |
| TCCR1A |= _BV(WGM11); | |
| TCCR1B |= _BV(WGM13) | _BV(WGM12); | |
| // write 16bit register | |
| ATOMIC_BLOCK(ATOMIC_RESTORESTATE) { | |
| // TOP | |
| ICR1 = 421U; | |
| // Compare | |
| OCR1A = 140U; | |
| } | |
| // Clock Select = "no prescaling" | |
| TCCR1B |= _BV(CS10); | |
| Serial.begin(9600); | |
| Serial.setTimeout(15000UL); | |
| } | |
| void command(byte* cmd, size_t len_cmd) { | |
| // leader | |
| digitalWrite(8, HIGH); | |
| delayMicroseconds(T * 8); | |
| digitalWrite(8, LOW); | |
| delayMicroseconds(T * 4); | |
| // data | |
| for(int i = 0; i < len_cmd; i++) { | |
| byte b = cmd[i]; | |
| for(int j = 7; j >= 0; j--){ | |
| digitalWrite(8, HIGH); | |
| delayMicroseconds(T * 1); | |
| digitalWrite(8, LOW); | |
| delayMicroseconds(T * (bitRead(b, j)? 3: 1)); | |
| } | |
| } | |
| // trailer | |
| digitalWrite(8, HIGH); | |
| delayMicroseconds(T * 1); | |
| digitalWrite(8, LOW); | |
| delay(1); | |
| } | |
| void loop() { | |
| if(Serial.available()){ | |
| String s = Serial.readStringUntil('\n'); | |
| byte cmd[6]; | |
| int len_cmd = 0; | |
| char buf[3]; | |
| buf[2] = '\0'; | |
| int len = s.length() - 1; | |
| for(int i = 0; i < len; i++) { | |
| buf[0] = s[i++]; | |
| buf[1] = s[i]; | |
| byte b = strtol(buf, NULL, 16); | |
| Serial.print(b, HEX); | |
| Serial.print(" "); | |
| cmd[len_cmd++] = b; | |
| } | |
| command(cmd, len_cmd); | |
| Serial.println(""); | |
| } | |
| } |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| $ python3 -m serial.tools.miniterm -e /dev/ttyAMA0 9600 | |
| #----- | |
| 344A90BC2C | |
| #----- |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment