Created
April 14, 2020 02:52
-
-
Save cgobat/ebd78fae8258e5f3c4f428970a3b2487 to your computer and use it in GitHub Desktop.
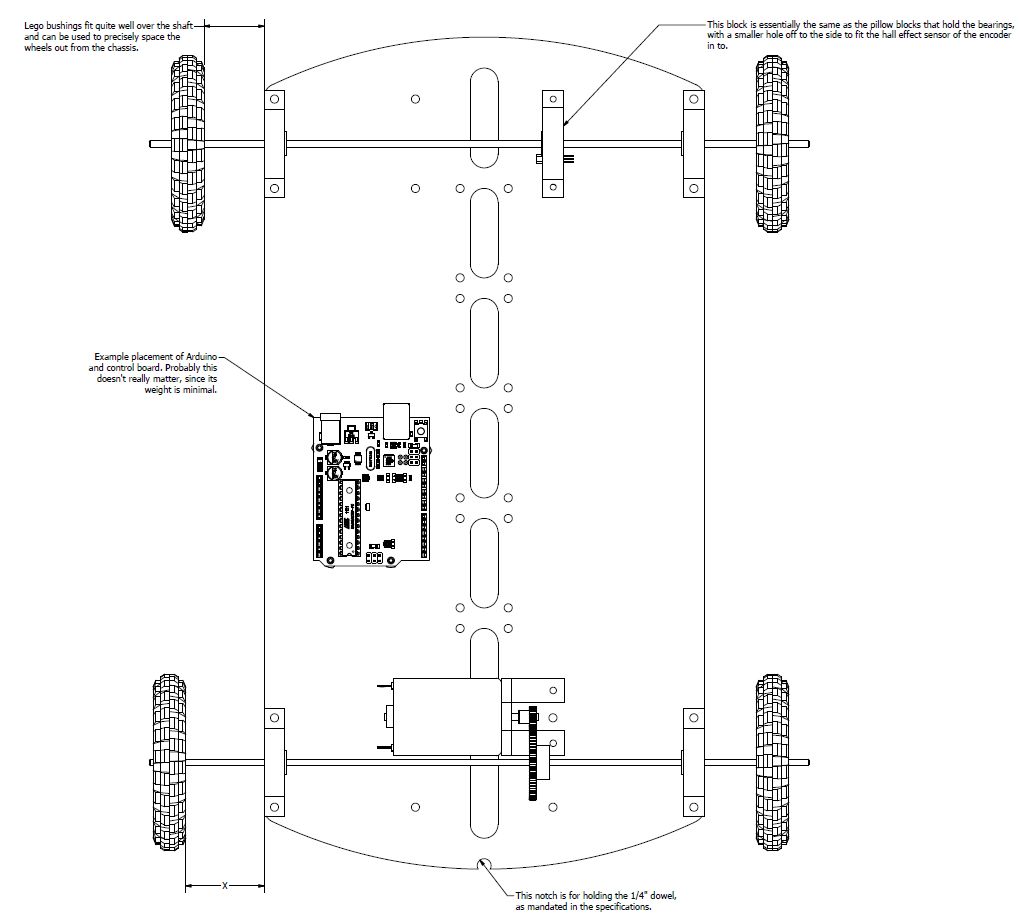
Science Olympiad Electric Vehicle code. Target distance is set using 3 rotary dials and progress is counted using a hall effect sensor.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| long cm; //goal distance | |
| long target; //target # of pulses | |
| volatile long pulses; //current # of pulses | |
| long timer; //time elapsed since start | |
| float conv = 10.208; //cm per 100 pulses | |
| long gatecm = 900; //distance to run before slowing down | |
| long gateTarget; //number of pulses the previous translates to | |
| long dir; //current direction of motion | |
| void setup() | |
| { | |
| pinMode(4, INPUT_PULLUP); // SW1 bit 0 | |
| pinMode(5, INPUT_PULLUP); // SW1 bit 1 | |
| pinMode(6, INPUT_PULLUP); // SW1 bit 2 | |
| pinMode(7, INPUT_PULLUP); // SW1 bit 3 | |
| pinMode(15, INPUT_PULLUP); // SW2 bit 0 | |
| pinMode(14, INPUT_PULLUP); // SW2 bit 1 | |
| pinMode(8, INPUT_PULLUP); // SW2 bit 2 | |
| pinMode(9, INPUT_PULLUP); // SW2 bit 3 | |
| pinMode(19, INPUT_PULLUP); // SW3 bit 0 | |
| pinMode(18, INPUT_PULLUP); // SW3 bit 1 | |
| pinMode(17, INPUT_PULLUP); // SW3 bit 2 | |
| pinMode(16, INPUT_PULLUP); // SW3 bit 3 | |
| pinMode(2, INPUT_PULLUP); // encoder | |
| pinMode(13, INPUT_PULLUP); // switch | |
| attachInterrupt(0, encoderPinChange, CHANGE); | |
| Serial.begin(115200); | |
| } | |
| void loop() { | |
| int hun, ten, one, val, i; | |
| // The rotary switch bits are pulled up when open. | |
| // When closed, they connect to ground, so an "active" | |
| // bit reads 0/low | |
| hun = 0; | |
| hun += digitalRead(4) == 0 ? 100 : 0; | |
| hun += digitalRead(5) == 0 ? 200 : 0; | |
| hun += digitalRead(6) == 0 ? 400 : 0; | |
| hun += digitalRead(7) == 0 ? 800 : 0; | |
| ten = 0; | |
| ten += digitalRead(15) == 0 ? 10 : 0; | |
| ten += digitalRead(14) == 0 ? 20 : 0; | |
| ten += digitalRead(8) == 0 ? 40 : 0; | |
| ten += digitalRead(9) == 0 ? 80 : 0; | |
| one = 0; | |
| one += digitalRead(19) == 0 ? 1 : 0; | |
| one += digitalRead(18) == 0 ? 2 : 0; | |
| one += digitalRead(17) == 0 ? 4 : 0; | |
| one += digitalRead(16) == 0 ? 8 : 0; | |
| cm = hun + ten + one; //read target value from dials | |
| target = (cm * 100L) / conv; //calculate needed pulses until target | |
| gateTarget = (gatecm * 100L) / conv; //calculate needed pulses until gate | |
| while (digitalRead(13) == 1); //wait for switch to be pressed | |
| delay(10); //wait to avoid bouncing | |
| pulses = 0; //reset encoder | |
| timer = millis(); //set time out count | |
| dir = 1; | |
| analogWrite(10, 230); | |
| analogWrite(11, 0); | |
| while (pulses <= gateTarget && digitalRead(13) == 0 && millis() <= timer + 10000); //encoder count to 9 meters or time out if never reached | |
| analogWrite(10, 0); | |
| analogWrite(11, 0); | |
| delay(10); //wait to dissipate field | |
| analogWrite(10,0); | |
| analogWrite(11, 230); | |
| delay(1000); | |
| analogWrite(10, 0); | |
| analogWrite(11, 100); //turn on brakes | |
| delay(2000); //wait to finish coast | |
| analogWrite(11, 0); | |
| analogWrite(11, 50); //turn on brakes | |
| delay(2000); //wait to finish coast | |
| if (pulses < target) { //if we have yet to reach it, | |
| timer = millis(); //reset time out baseline | |
| dir = 1; | |
| analogWrite(10, 120); //motor creep in original direction | |
| analogWrite(11, 0); //motor still off in other direction | |
| while (pulses < target && digitalRead(13) == 0 && millis() <= timer + 10000); //encoder count to target | |
| analogWrite(11, 0); | |
| analogWrite(10, 0); | |
| delay(10); //wait to dissipate EM field | |
| analogWrite(10, 0); | |
| analogWrite(11, 30); //turn on brakes | |
| delay(3000); //wait to finish coast | |
| } | |
| analogWrite(10, 0); //turn off | |
| analogWrite(11, 0); //motor completely | |
| while (digitalRead(13) == 0) //wait for switch to be flipped back up | |
| Serial.println(pulses); | |
| } | |
| void encoderPinChange() { | |
| pulses += dir; | |
| } |
Author
cgobat
commented
Apr 19, 2020
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment