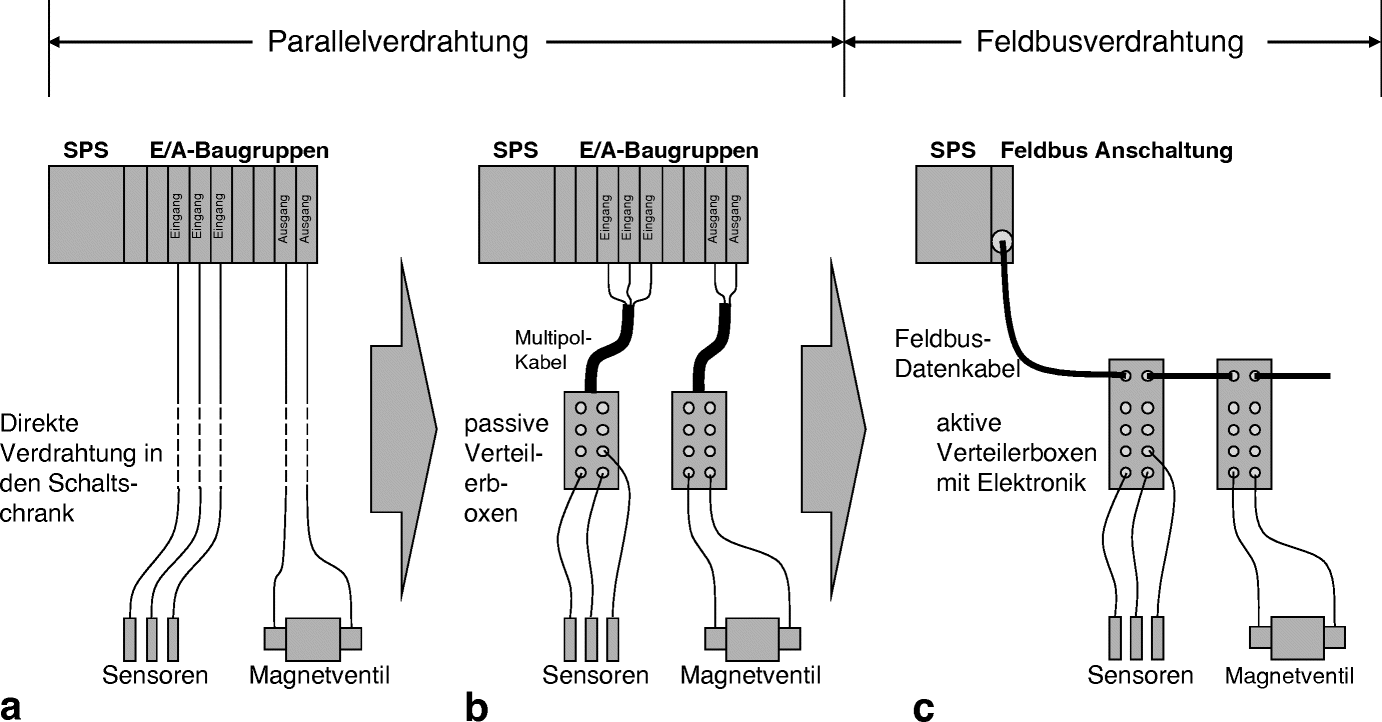
Um dezentrale Feldgeräte (Sensoren und Aktoren) anzusteuern gibt es verschiedene Verbindungstechniken:
- Konventionelle Verdrahtung
- Direkte Verdrahtung von der SPS zu jedem Bauelement im Feld
- Eine Leitung je Feldgerät erfordert einen hohen Ressourcenbedarf
- Unflexibel bei Änderungen
- Herausforderungen bei Analogsignalen (Spannungsabfall proportional zur Leitungslänge)
- Dezentrale Peripherie
- Serielles Bussystem zwischen Zentraleinheit (SPS) und mehreren Remote-IO-Einheiten
- Bessere Erweiterbarkeit bei geringeren Kosten
- Verwendung konventioneller Feldgeräte ist möglich
- z.B. Profibus DP
- Feldbus
- Busfähige Feldgeräte
- Feldgeräte können von der SPS direkt über den Bus adressiert werden
- Hohe Flexibilität
- Teuer, da bestehende Feldgeräte durch busfähige Geräte ausgetauscht werden müssen
- z.B. ASi-Bus ("Actuator-Sensor-Interface")
Einen Vergleich der Verbindungstechniken (Klassische Verdrahtung, dezentrale Peripherie, Feldbus) gibt es unter diesem Link.
{kind=link}
Bei der Auswahl von Bussystemen sind unter anderem die folgenden Anforderungen zu betrachten:
- Datenmenge
- Übertragungszeit
- Übertragungsphysik (Schirmung, Leitungslänge, Eigensicherheit, Stromversorgung über Bus)
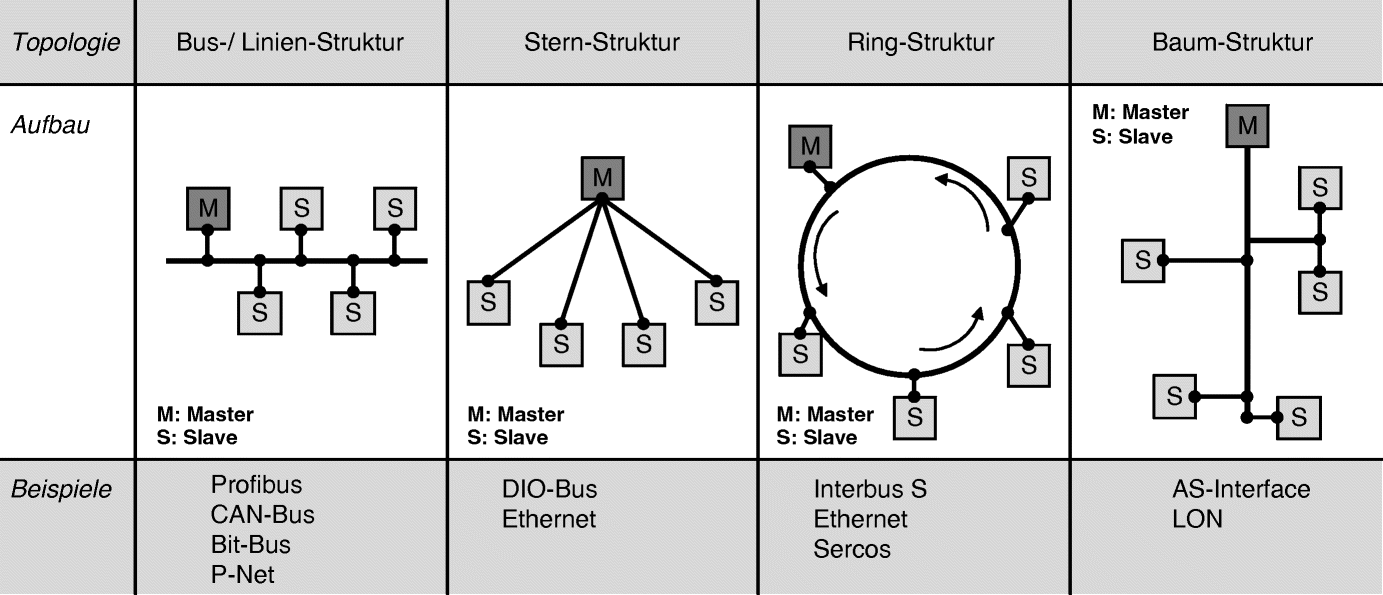
Feldbussysteme werden typischer in folgenden Topologien aufgebaut:
- Linie (benötigt Abschlusswiderstände zur Vermeidung von Reflexionen)
- Stern
- Ring
- Baum
Unter diesem Link werden die Topologien von Feldbussystemen dargestellt.
{kind=link}
Bei Zugriffen verschiedener Teilnehmer auf eine gemeinsame physikalische Verbindung sind Herausforderungen zu meistern. Dabei ist grundsätzlich zwischen den Zugriffsverfahren zu unterscheiden:
- Zufälliger Buszugriff
- Deterministischer / kontrollierter Buszugriff
Bei zufälligen Buszugriffen sind die Buszugriffsverfahren in der Lage, selbstständig mit den Herausforderungen bei gleichzeitigem Buszugriff umzugehen.
Prinzip: Jeder Busteilnehmer darf jederzeit kommunzieren. Kollisionen werden erkannt und vermieden, fehlerhafte Nachrichten werden wiederholt.
Ablauf:
- Jeder Teilnehmer prüft vor dem Senden, ob der Bus frei ist (Carrier Sense)
- Wenn frei, dann Sendeversuch
- Im Falle von Kollisionen Abbruch und Wiederholung des Sendeversuchs
- Anwendung z.B. bei Ethernet
- Erkennung von Kollision durch Datenabgleich (gleichzeitiges Zuhören auf dem Bus während des eigenen Sendens)
- Sendewiederholung nach teilnehmerspezifischer Wartezeit
Vorteile:
- niedrige Busbelastung
- kurze Latenzzeit im Niedriglastbereich
Nachteile:
- hohe Latenzzeit im Hochlastbereich
- Anwendung z.B. bei CAN
- Vermeidung von Kollision durch Prioritätsregeln (z.B. niedrigste / höchste Adresse zuerst)
- Sendewiederholung nach teilnehmerspezifischer Wartezeit
Vorteile:
- geringe zeitliche Verzögerung von Nachrichten hoher Priorität
Nachteile:
- lange Zeitverzögerung von Nachrichten möglich (nicht vorhersagbar)
Bei deterministischen Buszugriffen sind die Zugriffe auf den Bus durch das Buszugriffsverfahren eindeutig festgelegt. Alle Teilnehmer halten sich daran.
Prinzip: Nur der Besitzer des Tokens (Sendeberechtigung) darf kommunzieren. Weitergabe des Tokens nach maximaler Zeitdauer.
Art des Token-Passing Verfahrens:
- Token Bus: Linientopologie, logische Folge von Teilnehmern
- Token Ring: Ringtopologie, Reihenfolge des Senderechts = physikalische Reihenfolge im Ring
Vorteile:
- gutes vorhersagbares Echtzeitverhalten
- sehr gute Hochlasttauglichkeit
Nachteile:
- lange Verzögerungszeiten im Fehlerfall
- Überwachung der Token-Weitergabe
- Reinitialisierung nach Tokenverlust notwendig
Prinzip: Übergeordneter Busteilnehmer (Master) legt fest, wer von den Teilnehmern (Slaves) kommunizieren darf. Kommunikation nur zwischen Master und Slave, nie direkt zwischen den Slaves.
Vorteile:
- einfache Organisation
- sichergestellte Maximalzeit
Nachteile:
- maximale Latenzzeit ist proportional zur Anzahl der Busteilnehmer
- bei Ausfall des Masters ist keine Kommunikation mehr möglich
Prinzip: Jeder Teilnehmer bekommt innerhalb einer Periode (TDMA-Zyklus) einen oder mehrere Zeitschlitze bestimmter Läge zugeteilt.
Vorteile:
- kurze und konstante Zykluszeit
- geringer Protokoll-Overhead
Nachteile:
- zeitliche Synchronisation der Teilnehmer ist notwendig
- wenig flexibel bzw. keine dynamische Anpassung möglich
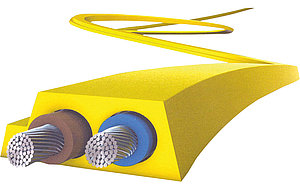
Ein Bild der ASi-Bus Flachbandleitung in gelb mit dem markantem Querschnitts-Profil gibt es hier: Link
{kind=link}
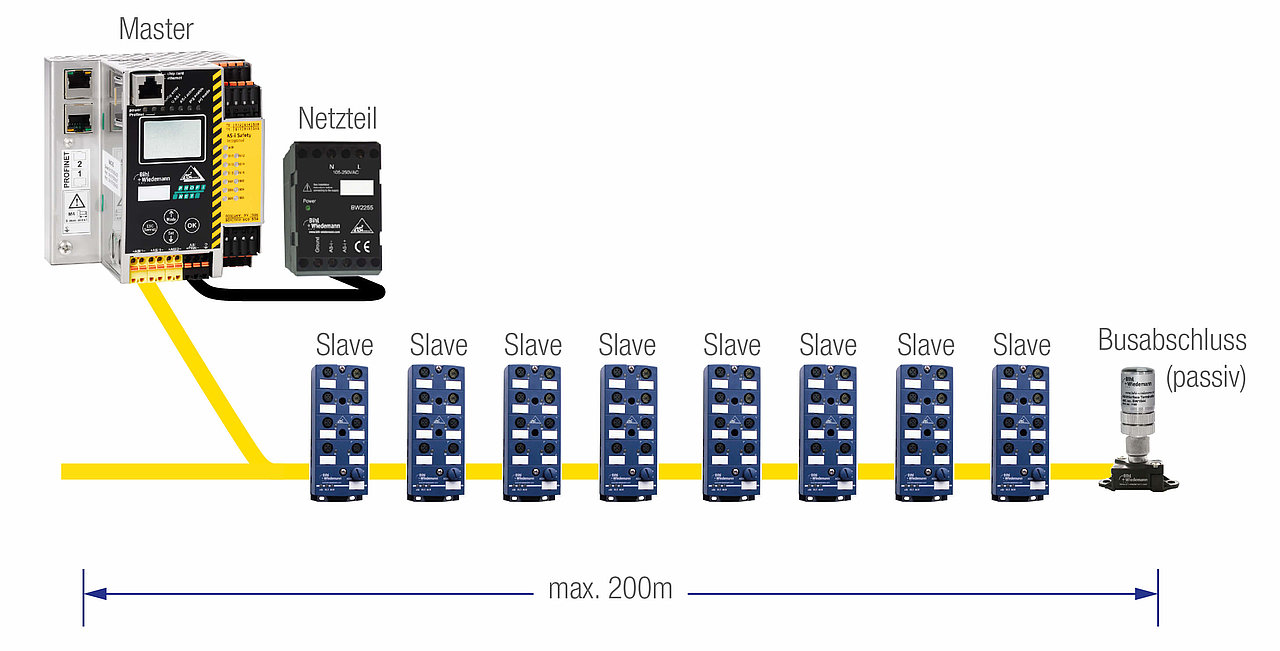
- Der ASi-Bus dient dem Anschluss dezentraler Sensoren und Aktoren im Feld.
- Ziel: Alternative zur herkömmlichen Parallelverdrahtung.
- Prinzip: Single-Master, Multiple-Slave
- Die Zykluszeit für 31 Teilnehmer beträgt 5 Millisekunden. Es sind max. 62 Teilnehmer möglich.
- Maximale Leitungslänge: 100 m, kann durch spezielle Abschlusswiderstände auf 300 m verlängert werden.
- Die Topologie ist beliebig.
- ASi-Busleitungen sind ungeschirmte, zweiadrige Flachbandleitungen in gelb.
- Die Leitungen arbeiten mit der Durchdringungstechnik. Die Leitung wird in einen Busteilnehmer eingelegt und dessen Kontakte schneiden die Adern an. Dadurch wird der Aufwand in der Verdrahtung reduziert.
- Die Profil-Form der Flachbandleitung gewährleistet zusätzliche Verpolungssicherheit.
- Neben den Steuersignalen werden die Teilnehmer über die Busleitung mit Funktionskleinspannung (24 V DC, PELV) versorgt.
- Für Teilnehmer mit höherem Stromverbrauch können diese mittels einer schwarzen Leitung zusätzlich versorgt werden.
- Durch Schnittstellenmodule kann Kompatibilität zu anderen Feldbussen erreicht werden, z.B. Profibus DP, Profinet RT.
- "Safety at Work" ermöglicht Safety-Anwendungen (Not-Aus, Lichtgitter, etc.) im ASi-Netz.
ASi-Bus Leitung mit Durchdringungstechnik
{kind=link}
{kind=link}
Das Modbus-Protokoll gilt als recht weit verbreiteter Standard in der industriellen Kommunikation und wurde ursprünglich von Schneider-Electric entwickelt. Es ist ein quelloffenes Protokoll, was dessen Verbreitung hin zum de-facto Standard stark gefördert hat.
Modbus kann seriell oder via Ethernet betrieben werden:
- Seriell
- Modbus RTU (Remote Terminal Unit)
Binäre Datenübertragung, nicht menschenlesbar, gute Performance - Modbus ASCII
Wie Modbus RTU, allerdings Datenübertragung im ASCII-Format, menschenlesbar, schlechtere Performance
- Modbus RTU (Remote Terminal Unit)
- Ethernet
- Modbus TCP
Ähnlich Modbus RTU, allerdings über TCP/IP, POrt 502/tcp - Modbus TCP Security Protocol
Seit Oktober 2018 standardisiert, Modbus TCP über TLS, verwendet X509.v3-Zertifikate, Port 802/tcp
- Modbus TCP
Der englische Wikipedia-Artikel beschreibt weitere Details über das Protokoll: https://en.wikipedia.org/wiki/Modbus
Beispiel-Datenverkehr:
- https://github.com/ITI/ICS-Security-Tools/tree/master/pcaps/ModbusTCP
- https://www.cloudshark.org/captures/76038eaa4a3b
Profibus entstand aus einem deutschen Forschungsprojekt und gilt ebenfalls als sehr weit verbreiteter, serieller Feldbus in der Automatisierungstechnik.
Profibus kann in drei verschiedenen Varianten eingesetzt werden:
- Profibus FMS (Fieldbus Message Specification):
Wurde von Profibus DP abgelöst. - Profibus DP (dezentrale Peripherie)
- Ansteuerung von Sensoren und Aktoren durch eine Zentraleinheit (SPS)
- Verbindung "verteilter Intelligenz" zwischen mehreren SPS-Steuerungen
- Datenraten bis zu 12 MBit/s
- Profibus PA (Prozess-Automation)
- Profibus-Variante mit eigenem Physical Layer (Übertragungsschicht)
- Profibus DP wird über sogenannte Koppler an mehrere Segmente (PA-Segmente) mit Feldgeräten angeschlossen
- Zweiadrige Busleitung für Kommunikation und Energieversorgung der Teilnehmer
- Digitale Alternative zur klassischen analogen Verbindung von Geräten (4- bis 20-mA-Technik)
- Elektrische Leistungsbegrenzung ermöglicht den Einsatz in explosionsgefährdeten Bereichen (EX-Bereiche).
- Bandbreite von 31,25 kbit/s ermöglicht hohe Immunität gegenüber elektromagnetischen Interferenzen
Das Buszugriffsverfahren von Profibus besteht aus dem Token-Passing-Verfahren in Kombination mit Master-Slave.
PROFIsafe spezifiziert ein Datenprofil für den Safety-Einsatz.
Es kommen 9-polige Sub-D Stecker zum Einsatz. Die Leitungen sind typischerweise lila.
Die typischen Profibus-Stecker und die lila-farbenen Leitungen gibt es hier zu sehen: Link
{kind=link}
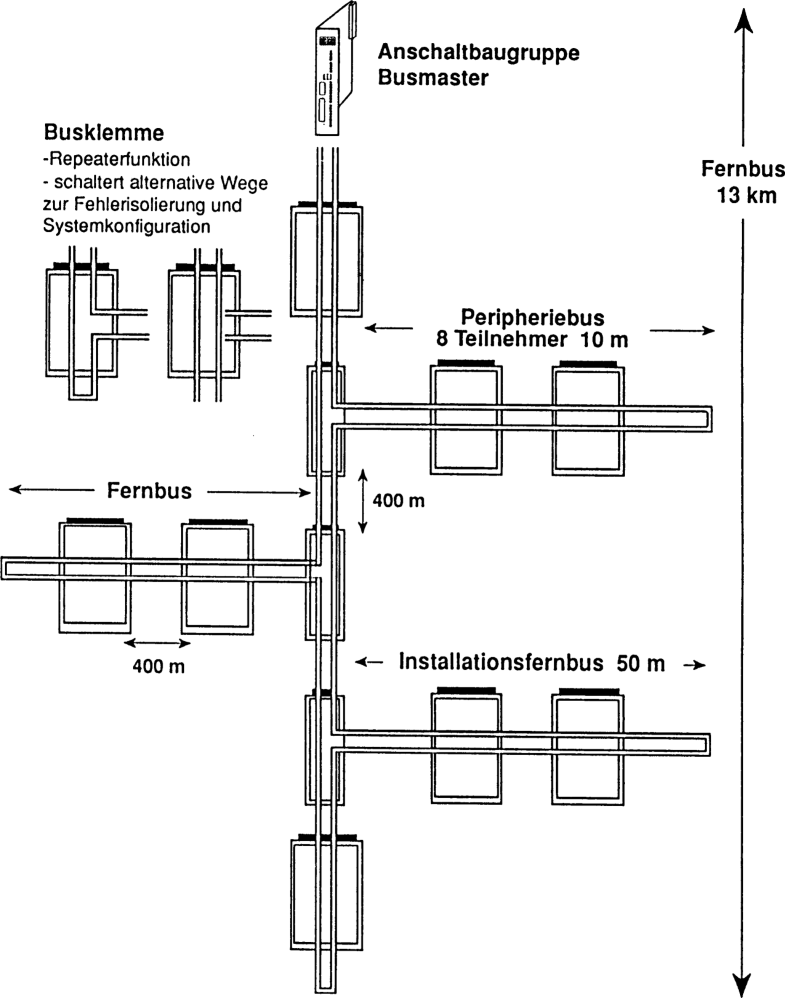
Interbus wurde ursprünglich von Phoenix-Contact entwickelt.
Kann in den folgenden Ausprägungen eingesetzt werden:
- Fernbus
- Energieversorgung am Teilnehmer
- max. 400 m zwischen den Teilnehmern, max. 13 km Gesamtlänge
- RS485-Schnittstelle
- Installationsfernbus
- wie Fernbus, jedoch mit zentraler Energieversorgung
- Lokalbus
- zweigt über Buskoppler (Busklemmen) vom Fernbus ab
- keine weitere Verzweigung möglich
- zentrale Energieversorgung
- kann einzeln vom Fernbus getrennt (abgeschaltet) werden
- Interbus-Loop
- 20 cm – 20 m zwischen zwei Teilnehmern, maximal 200 m Gesamtlänge
- Zweidrahtinterface für zentrale Energieversorgung und aufmodulierte Busdaten
- Auflösung in nun auch physische Ringstruktur
Ein Interbus Netzwerk stellt topologisch eine aktive Ringstruktur dar. Da Hin- und Rückkanal jedoch in einem Anschlusskabel vereinigt sind und die Teilnehmer mindestens 2 Anschlussklemmen besitzen (ankommend / abgehend), ergibt sich eine baumartige, physische Verkabelungsstruktur. Zum Schließen des Rings können alle Busteilnehmer ihre Ausgänge intern überbrücken, sofern kein weiterer Teilnehmer folgt. Bei Verzweigungen an sogenannten Busklemmen wird der neue Zweig in den Hinkanal eingebunden und der Ring so erweitert. Sollte ein Teilnehmer durch Störung ausfallen, überbrückt der vorherige Teilnehmer seinen Ausgang um den Ring zu schließen und das System bis zum fehlerhaften Teilnehmer lauffähig zu halten.
Die typische Interbus-Topologie mit baumartigem, physischem Aufbau und logischer Ringstruktur: Link
{kind=link}
Alle Teilnehmer wirken als Repeater. Zur Verkabelung von Fern- und Lokalbus können sowohl elektrische als auch Lichtwellenleiter genutzt werden. Alle Teilnehmer agieren als Slave unter einem am Fernbus angeschlossenen Master (Anschaltbaugruppe). Die Bandbreite beträgt 50 kBit/s bzw. 2 MBit/s.
2012 entschied sich der INTERBUS-Club, den Verein aufzulösen und die Pflege der INTERBUS Technologie zusammen mit dem Nachfolgesystem Profinet in der PNO zu organisieren. Nach positiver Entwicklung bis ca. 2003 ist zu beobachten, dass sich eine Vielzahl von Sensor- und Aktor-Herstellern allmählich aus dem Segment "interbusfähige Geräte" zurückzieht.
Die CAN-Bus Technologie wurde ursprünglich von der Robert Bosch GmbH zur Verknüpfung diverser Steuerungssysteme und Kabelbäumen in Kraftfahrzeugen entwickelt. Mit dem CAN-Bus können Steuerungen in Kfz ohne eine zentrale Master-Einheit miteinander kommunizieren (Multi-Master). CAN wird heute jedoch für diverse anderen Anwendungen eingesetzt.
Der Buszugriff wird dabei durch CSMA/CA koordiniert. DIe Bandbreiten liegen zwischen 50 kBit/s und 1 MBit/s.
Es gibt viele weitere Protokolle, die auf dem CAN-Bus basieren:
- CANopen
- DeviceNet
- SafetyBUS p
- Weitere siehe: https://de.wikipedia.org/wiki/Controller_Area_Network#H%C3%B6here_Protokolle