Last active
July 2, 2020 02:31
-
-
Save jamesamiller/8e1111ae383124749818533cbbed3e5c to your computer and use it in GitHub Desktop.
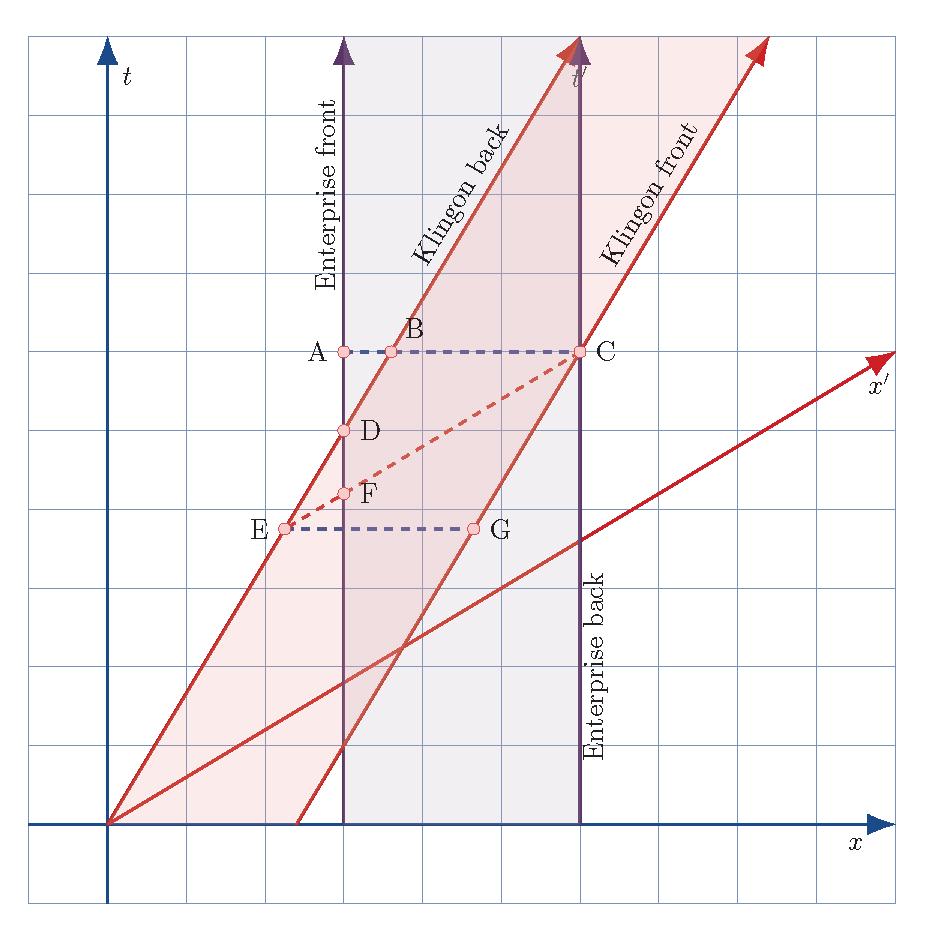
Spacetime diagram for a Klingon-Enterprise battle. The second variation. (special relativity)
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| \documentclass[crop=true, border=10pt]{standalone} | |
| \usepackage{comment} | |
| \begin{comment} | |
| :Title: Klingons and Enterprise II | |
| :Author: J A Miller, UAH Physics & Astronomy, millerja@uah.edu | |
| 2020/07/01 | |
| Spacetime diagram of an Enterprise - Klingon battle. The second of a few variations. | |
| References: | |
| 1. https://www1.phys.vt.edu/~takeuchi/relativity/practice/problem07.html | |
| 2. Basic plot style and colors from | |
| https://gist.github.com/mcnees/45b9f53ad371c38ba6f3759df5880fb1 | |
| --------------------------------------------------------------------- | |
| Problem to accompany figure | |
| --------------------------------------------------------------------- | |
| See the above reference. He has a nice, vivid description of the problem. | |
| --------------------------------------------------------------------- | |
| Figure caption | |
| --------------------------------------------------------------------- | |
| \caption{ | |
| Spacetime diagram of an Enterprise - Klingon battle. \textit{Blue arrows:} The unprimed frame of the stars and the Enterprise. \textit{Red arrows:} The primed frame of the Klingon ship, and the worldline of the ship front (the back of the ship is the $t^\prime$ axis). \textit{Purple arrows:} The worldlines of the Enterprise front and back. \textit{Dashed lines:} lines of simultaneity. For Exercise \ref{exer-klingonII}. | |
| } | |
| --------------------------------------------------------------------- | |
| Solution to problem | |
| --------------------------------------------------------------------- | |
| See reference. | |
| \end{comment} | |
| \usepackage{tikz} | |
| \usetikzlibrary{arrows.meta,calc,intersections} | |
| \usepackage{pgfplots} | |
| \pgfplotsset{compat=1.16} | |
| \usepackage{xcolor} | |
| \definecolor{plum}{rgb}{0.36078, 0.20784, 0.4} | |
| \definecolor{chameleon}{rgb}{0.30588, 0.60392, 0.023529} | |
| \definecolor{cornflower}{rgb}{0.12549, 0.29020, 0.52941} | |
| \definecolor{scarlet}{rgb}{0.8, 0, 0} | |
| \definecolor{brick}{rgb}{0.64314, 0, 0} | |
| \definecolor{sunrise}{rgb}{0.80784, 0.36078, 0} | |
| \definecolor{lightblue}{rgb}{0.15,0.35,0.75} | |
| % ----------------------- parameter specifications ------------------------ | |
| % the speed of the primed frame | |
| \newcommand*\vp{0.6} | |
| % proper length of both ships | |
| % enterprise front will stay at x=3 | |
| \newcommand*\length{3.0} | |
| % graph boundaries | |
| \newcommand*{\xa}{-1} % lower left corner | |
| \newcommand*{\ya}{-1} | |
| \newcommand*{\xb}{10} % upper right corner | |
| \newcommand*{\yb}{10} | |
| % x and y scales | |
| \newcommand*{\xscale}{1cm} | |
| \newcommand*{\yscale}{1cm} | |
| % some calculations now ... | |
| % gamma and eta factors for the primed frame | |
| \pgfmathsetmacro{\gamp}{1/sqrt(1-\vp*\vp)} | |
| \pgfmathsetmacro{\etap}{\vp*\gamp} | |
| % ------------------------ other functions ------------------------------ | |
| % Extract coordinate | |
| % https://tex.stackexchange.com/questions/477075/coordinates-unit-in-pt-although-default-is-cm-in-tikz | |
| % Example: | |
| % \ExtractCoordinate{x}; | |
| % \node[above] at (\XCoord,\YCoord) {node}; | |
| \newdimen\XCoord | |
| \newdimen\YCoord | |
| \newcommand*{\ExtractCoordinate}[1]{\path (#1); \pgfgetlastxy{\XCoord}{\YCoord};} | |
| % ------------------------ begin figure ------------------------------ | |
| \begin{document} | |
| \begin{tikzpicture}[ | |
| scale=1, | |
| domain=\xa:\xb, | |
| x=\xscale,y=\yscale, | |
| axisarrow/.style=-{Latex[inset=0pt,length=10pt]}, | |
| minor gridlines/.style={cornflower!30,step=0.2,thin}, | |
| major gridlines/.style={cornflower!60,step=1.0,thin}, | |
| axes/.style={cornflower,thick,axisarrow}, % unprimed axes | |
| primed axes/.style={scarlet,thick,axisarrow}, % primed axes | |
| primed major gridlines/.style={scarlet!60,thin}, | |
| double primed axes/.style={chameleon,thick,axisarrow}, % double primed axes | |
| double primed major gridlines/.style={chameleon!60,thin}, | |
| LOS/.style={cornflower,thick,dashed}, % line of simultaneity in unprimed frame | |
| LOS primed/.style={scarlet,thick,dashed}, % line of simultaneity in primed frame | |
| LOS double primed/.style={chameleon,thick,dashed}, % line of simultaneity in primed frame | |
| light ray/.style={sunrise,thick,axisarrow}, | |
| textnode/.style={inner sep=0pt}, % for a text only node | |
| dot/.style={circle,draw=scarlet!70,fill=scarlet!20,inner sep=1.5pt} | |
| ] | |
| % some coordinates | |
| \coordinate (O) at (0,0); | |
| % Draw the grid for the unprimed frame | |
| %\draw [minor gridlines] (\xa,\ya) grid (\xb,\yb); | |
| \draw [major gridlines] (\xa,\ya) grid (\xb,\yb); | |
| % Draw unprimed axes | |
| \draw[axes,name path=taxis] (0,\ya) -- (0,\yb); | |
| \node[textnode] at (0.25,\yb-0.5) {$t$}; | |
| \draw[axes,name path=xaxis] (\xa,0) -- (\xb,0); | |
| \node[textnode] at (\xb-0.5,-0.25) {$x$}; | |
| % Draw the primed axes | |
| \draw[primed axes,name path=tpaxis] (O) -- (\vp*\yb,\yb) node (tp) {}; % klingon back worldline | |
| \node[textnode] at ($(tp)+(0,-0.5)$) {$t^\prime$}; | |
| \draw[primed axes,name path=xpaxis] (O) -- (\xb,\vp*\xb) node (xp) {}; | |
| \node[textnode] at ($(xp)+(-0.2,-0.4)$) {$x^\prime$}; | |
| % Worldlines for Enterprise | |
| \draw[thick,plum,axisarrow,name path=efront] (3,0) -- (3,\yb); | |
| \draw[thick,plum,axisarrow,name path=eback] (3+\length,0) -- (3+\length,\yb); | |
| % Draw the worldlines of the front of the Klingons | |
| \draw[primed axes,name path=kfront] (\length/\gamp,0) -- (\vp*\yb+\length/\gamp,\yb); | |
| % Get point C. This is the "pivot" for everything else. Get its $t^\prime$ value | |
| \path [name intersections={of=eback and kfront,by=C}]; | |
| % Point A | |
| \path let \p1=(C) in coordinate (A) at (3,\y1); | |
| % Point B | |
| \draw[LOS,name path=LOSAC] (A) -- (C); | |
| \path [name intersections={of=LOSAC and tpaxis,by=B}]; | |
| % Point D | |
| \path [name intersections={of=efront and tpaxis,by=D}]; | |
| % Now the line of simultaneity through C to E | |
| \path let \p1=(C) in coordinate (E) at ( { \etap*\gamp*(\y1-\vp*\x1) }, {\gamp*\gamp*(\y1-\vp*\x1)} ); | |
| \draw[LOS primed,name path=LOSC] (C) -- (E); | |
| % Point F | |
| \path [name intersections={of=LOSC and efront,by=F}]; | |
| % Line of simultaneity through E to G | |
| % *** Since tikz uses points internally, we need to convert a pure number to cm to have the same unit as \x1 | |
| \path let \p1=(E) in coordinate (G) at ({\x1+((1cm/1pt)*(\length)/\gamp)}, {\y1}); | |
| \draw[LOS,name path=LOSEG] (E) -- (G); | |
| % Shading | |
| \draw[fill=plum!40,opacity=0.2] (3,0) -- (3+\length,0) -- (3+\length,\yb) -- (3,\yb) -- (3,0); | |
| \draw[fill=scarlet!40,opacity=0.2] (0,0) -- (3/\gamp,0) -- (\vp*\yb+\length/\gamp,\yb) -- (\vp*\yb,\yb) -- (0,0); | |
| % Label the points | |
| \node[dot,label={right:C}] at (C) {}; | |
| \node[dot,label={left:A}] at (A) {}; | |
| \node[dot,label={above right:B}] at (B) {}; | |
| \node[dot,label={right:D}] at (D) {}; | |
| \node[dot,label={left:E}] at (E) {}; | |
| \node[dot,label={right:F}] at (F) {}; | |
| \node[dot,label={right:G}] at (G) {}; | |
| % Hard to keep track of front and back... better label | |
| % These are manually set. Need to adjust for a different primed frame speed | |
| \node[inner sep=0pt,rotate=90] at (2.8,8) {Enterprise front}; | |
| \node[inner sep=0pt,rotate=90] at (6.2,2) {Enterprise back}; | |
| \node[inner sep=0pt,rotate=59] at (6.9,8) {Klingon front}; | |
| \node[inner sep=0pt,rotate=59] at (4.5,8) {Klingon back}; | |
| \end{tikzpicture} | |
| \end{document} |
jamesamiller
commented
Jul 2, 2020
Author
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment