First of all, please install ROS1 through hlab-nxo-setup, and configure ~/.bashrc.
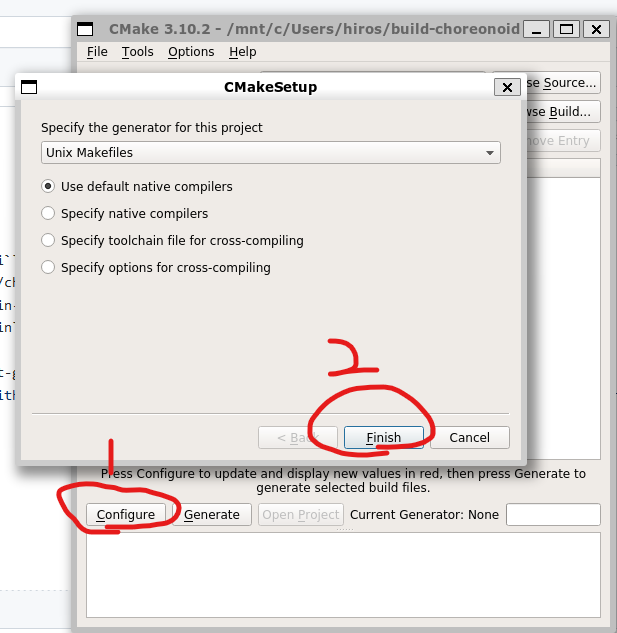
git clone http://spica.ms.t.kanazawa-u.ac.jp/gitlab/tsuji/grasp-plugin.git -b <branch>and enter your credential.git clone https://github.com/choreonoid/choreonoid.git --depth 1 -b v1.7.0ln -s `realpath ./grasp-plugin` ./choreonoid/ext/graspPluginsource ./choreonoid/misc/script/install-requisites-ubuntu-18.04.sh && sudo apt install cmake-qt-gui gnome-terminal dbus-x11 -ymkdir ./build-choreonoidcmake-gui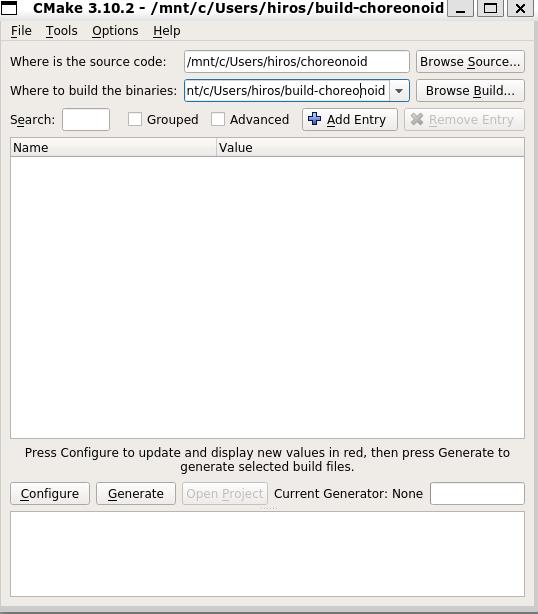
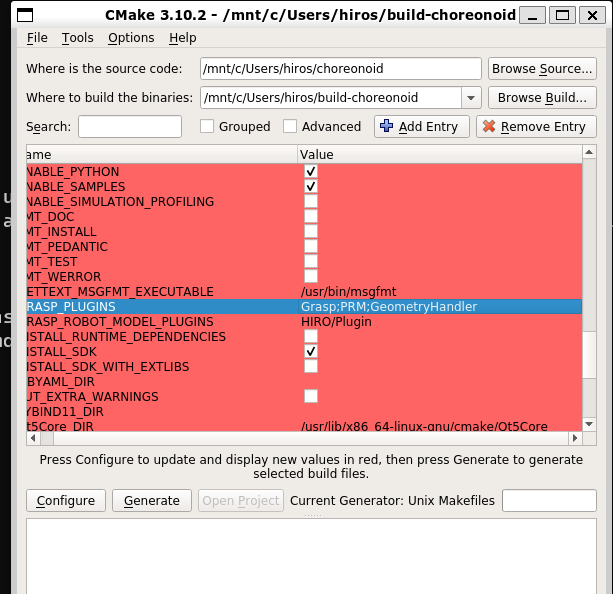
- Change GRASP_PLUGINS, GRASP_ROBOT_MODELS_PLUGINS, and then re-configure. GRASP_PLUGINS is which subdirectories to add to configuration. GRASP_ROBOT_MODELS_PLUGINS is which IK plugins to build & load in runtime. For example, if you use nextage, GRASP_ROBOT_MODELS_PLUGINS is HIRO/Plugin.
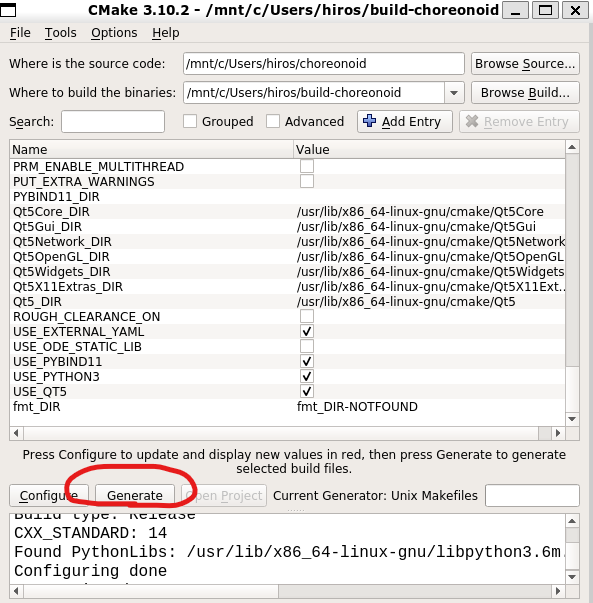
cd build-choreonoid/LIBRARY_PATH=/opt/ros/${ROS_DISTRO:-melodic}/lib make -j`nproc` -k && cd ..
gnome-terminal --window -e "bash -c \"sleep 3; ./hlab-nxo-setup/externals/eclipse/eclipse -debug -console; exec bash\"" \
--tab -e "bash -c \" ./choreonoid/ext/graspPlugin/RobotInterface/Nextage/THK/HandManipProvider.py; exec bash\"" \
--tab -e "bash -c \" ./choreonoid/ext/graspPlugin/RobotInterface/Nextage/PortDuplicator/PortDuplicator.py; exec bash\"" \
--tab -e "bash -c \" cd ./choreonoid/ext/graspPlugin/RobotInterface/Nextage/NextageInterface; ./HiroNXProvider.py;exec bash\"" \
--tab -e "bash -c \" ./hlab-nxo-setup/externals/hironx-interface/HiroNXInterface/HiroNXGUI/WxHiroNXGUI.py; exec bash\""
./build-choreonoid/bin/choreonoid


