-
-
Save pklaus/5921022 to your computer and use it in GitHub Desktop.
| #undef HID_ENABLED | |
| // Arduino Due ADC->DMA->USB 1MSPS | |
| // by stimmer | |
| // from http://forum.arduino.cc/index.php?topic=137635.msg1136315#msg1136315 | |
| // Input: Analog in A0 | |
| // Output: Raw stream of uint16_t in range 0-4095 on Native USB Serial/ACM | |
| // on linux, to stop the OS cooking your data: | |
| // stty -F /dev/ttyACM0 raw -iexten -echo -echoe -echok -echoctl -echoke -onlcr | |
| volatile int bufn,obufn; | |
| uint16_t buf[4][256]; // 4 buffers of 256 readings | |
| void ADC_Handler(){ // move DMA pointers to next buffer | |
| int f=ADC->ADC_ISR; | |
| if (f&(1<<27)){ | |
| bufn=(bufn+1)&3; | |
| ADC->ADC_RNPR=(uint32_t)buf[bufn]; | |
| ADC->ADC_RNCR=256; | |
| } | |
| } | |
| void setup(){ | |
| SerialUSB.begin(0); | |
| while(!SerialUSB); | |
| pmc_enable_periph_clk(ID_ADC); | |
| adc_init(ADC, SystemCoreClock, ADC_FREQ_MAX, ADC_STARTUP_FAST); | |
| ADC->ADC_MR |=0x80; // free running | |
| ADC->ADC_CHER=0x80; | |
| NVIC_EnableIRQ(ADC_IRQn); | |
| ADC->ADC_IDR=~(1<<27); | |
| ADC->ADC_IER=1<<27; | |
| ADC->ADC_RPR=(uint32_t)buf[0]; // DMA buffer | |
| ADC->ADC_RCR=256; | |
| ADC->ADC_RNPR=(uint32_t)buf[1]; // next DMA buffer | |
| ADC->ADC_RNCR=256; | |
| bufn=obufn=1; | |
| ADC->ADC_PTCR=1; | |
| ADC->ADC_CR=2; | |
| } | |
| void loop(){ | |
| while(obufn==bufn); // wait for buffer to be full | |
| SerialUSB.write((uint8_t *)buf[obufn],512); // send it - 512 bytes = 256 uint16_t | |
| obufn=(obufn+1)&3; | |
| } |
| #!/usr/bin/env python | |
| # from http://forum.arduino.cc/index.php?topic=137635.msg1270996#msg1270996 | |
| import pyqtgraph as pg | |
| import time, threading, sys | |
| import serial | |
| import numpy as np | |
| class SerialReader(threading.Thread): | |
| """ Defines a thread for reading and buffering serial data. | |
| By default, about 5MSamples are stored in the buffer. | |
| Data can be retrieved from the buffer by calling get(N)""" | |
| def __init__(self, port, chunkSize=1024, chunks=5000): | |
| threading.Thread.__init__(self) | |
| # circular buffer for storing serial data until it is | |
| # fetched by the GUI | |
| self.buffer = np.zeros(chunks*chunkSize, dtype=np.uint16) | |
| self.chunks = chunks # number of chunks to store in the buffer | |
| self.chunkSize = chunkSize # size of a single chunk (items, not bytes) | |
| self.ptr = 0 # pointer to most (recently collected buffer index) + 1 | |
| self.port = port # serial port handle | |
| self.sps = 0.0 # holds the average sample acquisition rate | |
| self.exitFlag = False | |
| self.exitMutex = threading.Lock() | |
| self.dataMutex = threading.Lock() | |
| def run(self): | |
| exitMutex = self.exitMutex | |
| dataMutex = self.dataMutex | |
| buffer = self.buffer | |
| port = self.port | |
| count = 0 | |
| sps = None | |
| lastUpdate = pg.ptime.time() | |
| while True: | |
| # see whether an exit was requested | |
| with exitMutex: | |
| if self.exitFlag: | |
| break | |
| # read one full chunk from the serial port | |
| data = port.read(self.chunkSize*2) | |
| # convert data to 16bit int numpy array | |
| data = np.fromstring(data, dtype=np.uint16) | |
| # keep track of the acquisition rate in samples-per-second | |
| count += self.chunkSize | |
| now = pg.ptime.time() | |
| dt = now-lastUpdate | |
| if dt > 1.0: | |
| # sps is an exponential average of the running sample rate measurement | |
| if sps is None: | |
| sps = count / dt | |
| else: | |
| sps = sps * 0.9 + (count / dt) * 0.1 | |
| count = 0 | |
| lastUpdate = now | |
| # write the new chunk into the circular buffer | |
| # and update the buffer pointer | |
| with dataMutex: | |
| buffer[self.ptr:self.ptr+self.chunkSize] = data | |
| self.ptr = (self.ptr + self.chunkSize) % buffer.shape[0] | |
| if sps is not None: | |
| self.sps = sps | |
| def get(self, num, downsample=1): | |
| """ Return a tuple (time_values, voltage_values, rate) | |
| - voltage_values will contain the *num* most recently-collected samples | |
| as a 32bit float array. | |
| - time_values assumes samples are collected at 1MS/s | |
| - rate is the running average sample rate. | |
| If *downsample* is > 1, then the number of values returned will be | |
| reduced by averaging that number of consecutive samples together. In | |
| this case, the voltage array will be returned as 32bit float. | |
| """ | |
| with self.dataMutex: # lock the buffer and copy the requested data out | |
| ptr = self.ptr | |
| if ptr-num < 0: | |
| data = np.empty(num, dtype=np.uint16) | |
| data[:num-ptr] = self.buffer[ptr-num:] | |
| data[num-ptr:] = self.buffer[:ptr] | |
| else: | |
| data = self.buffer[self.ptr-num:self.ptr].copy() | |
| rate = self.sps | |
| # Convert array to float and rescale to voltage. | |
| # Assume 3.3V / 12bits | |
| # (we need calibration data to do a better job on this) | |
| data = data.astype(np.float32) * (3.3 / 2**12) | |
| if downsample > 1: # if downsampling is requested, average N samples together | |
| data = data.reshape(num/downsample,downsample).mean(axis=1) | |
| num = data.shape[0] | |
| return np.linspace(0, (num-1)*1e-6*downsample, num), data, rate | |
| else: | |
| return np.linspace(0, (num-1)*1e-6, num), data, rate | |
| def exit(self): | |
| """ Instruct the serial thread to exit.""" | |
| with self.exitMutex: | |
| self.exitFlag = True | |
| # Get handle to serial port | |
| # (your port string may vary; windows users need 'COMn') | |
| s = serial.Serial('/dev/ttyACM0') | |
| # Create the GUI | |
| app = pg.mkQApp() | |
| plt = pg.plot() | |
| plt.setLabels(left=('ADC Signal', 'V'), bottom=('Time', 's')) | |
| plt.setYRange(0.0, 3.3) | |
| # Create thread to read and buffer serial data. | |
| thread = SerialReader(s) | |
| thread.start() | |
| # Calling update() will request a copy of the most recently-acquired | |
| # samples and plot them. | |
| def update(): | |
| global plt, thread | |
| t,v,r = thread.get(1000*1024, downsample=100) | |
| plt.plot(t, v, clear=True) | |
| plt.setTitle('Sample Rate: %0.2f'%r) | |
| if not plt.isVisible(): | |
| thread.exit() | |
| timer.stop() | |
| # Set up a timer with 0 interval so Qt will call update() | |
| # as rapidly as it can handle. | |
| timer = pg.QtCore.QTimer() | |
| timer.timeout.connect(update) | |
| timer.start(0) | |
| # Start Qt event loop. | |
| if sys.flags.interactive == 0: | |
| app.exec_() |
Minor correction: it should be (3.3/(2**12 - 1)) instead of (3.3/2**12) on this line.
Hello
I use this code, it works fine
But the result shows there is only 666kHzSPS, not 1MSPS.
Do you give me a direction to go?
Thanks
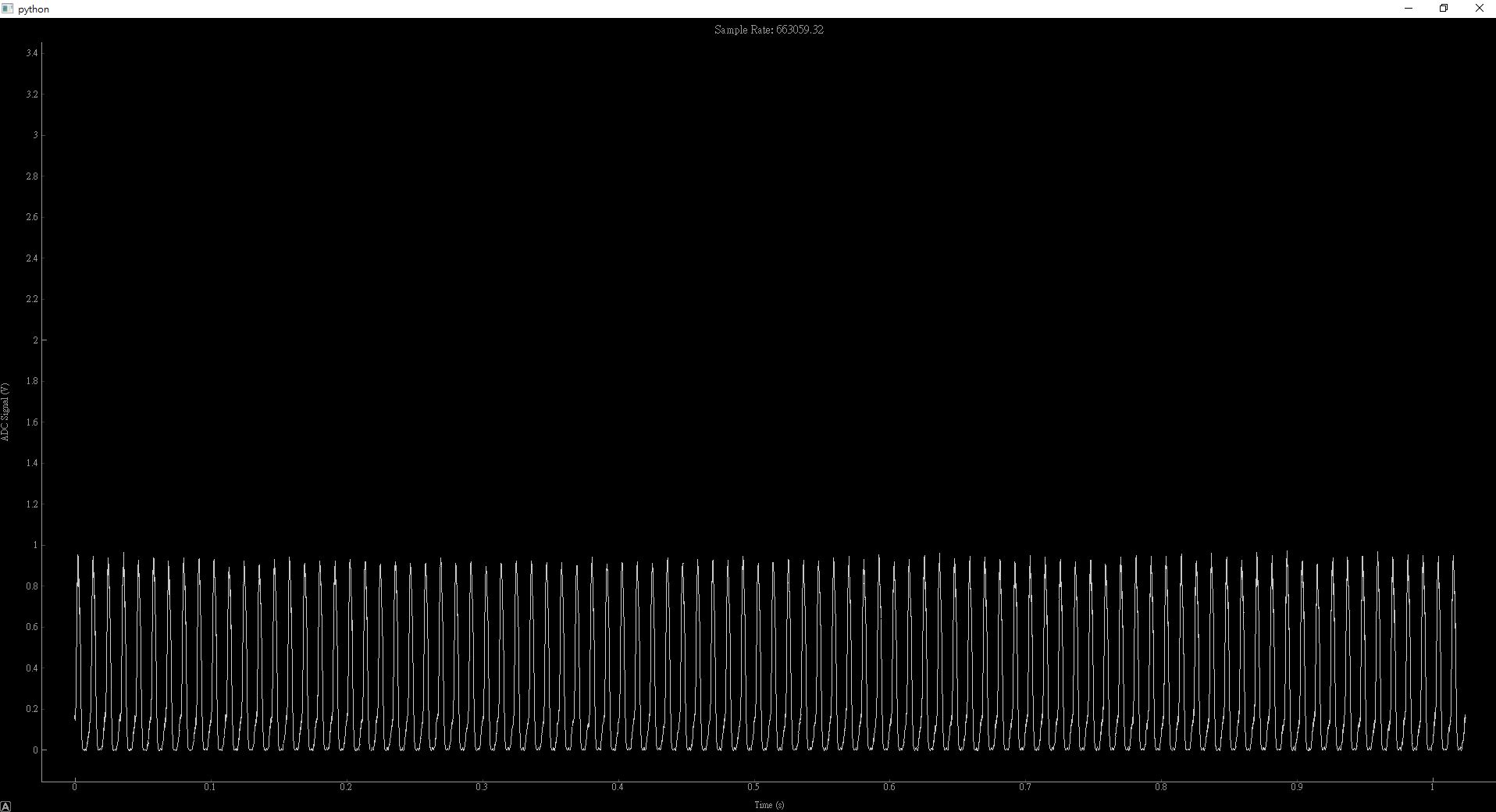
ADC_FREQ_MAX is defined as 20000000. The datasheet of the SAM3X specifies a max ADC frequency of 22MHz.
Use the following call to adc_init to get full 1MSPS:
adc_init(ADC, SystemCoreClock, 22000000, ADC_STARTUP_FAST);
This is great code! Is there any possibility to add more than one channel to the ADC? I am interested in using up to 5 analog inputs
Hello, may I ask why after executing app.exec_()
will keep running interactively
Traceback (most recent call last):
t,v,r = thread.get(1000*1024, downsample=100)
data = data.reshape(num/downsample,downsample).mean(axis=1)
TypeError: 'float' object cannot be interpreted as an integer
Hello
I use this code, it works fine
But the result shows there is only 666kHzSPS, not 1MSPS.
Do you give me a direction to go?
Thanks