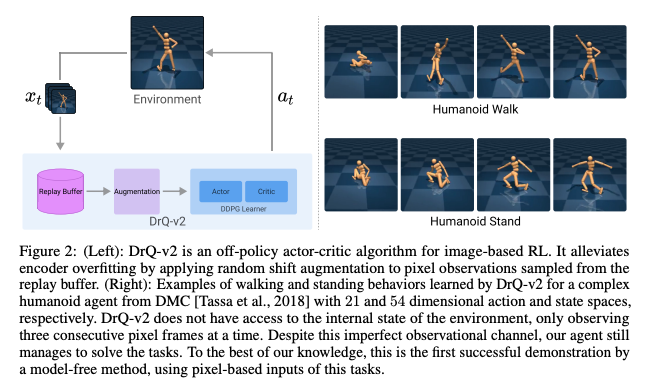
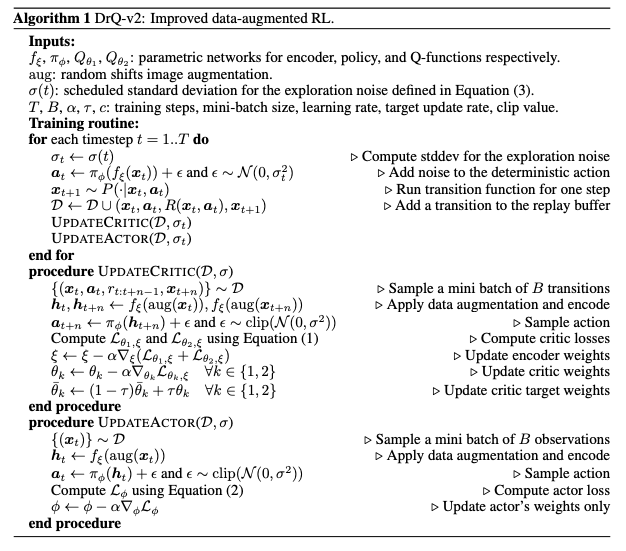
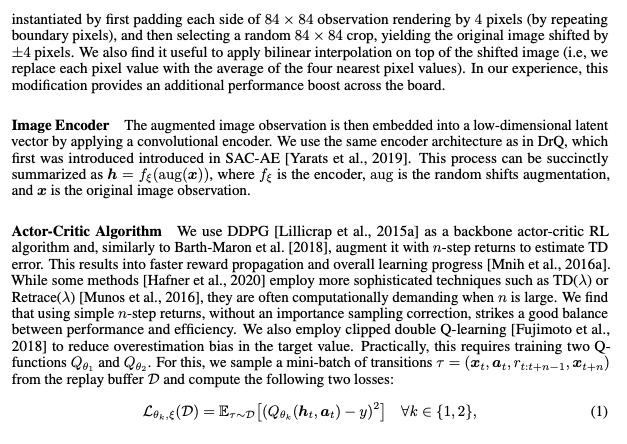
- 深層強化学習で 連続行動 と 視覚入力 を使ったものをまとめる
- 特に重要なテクニックが書かれていればそれも書き出す
- マルチモーダルな強化学習もあれば書いておく
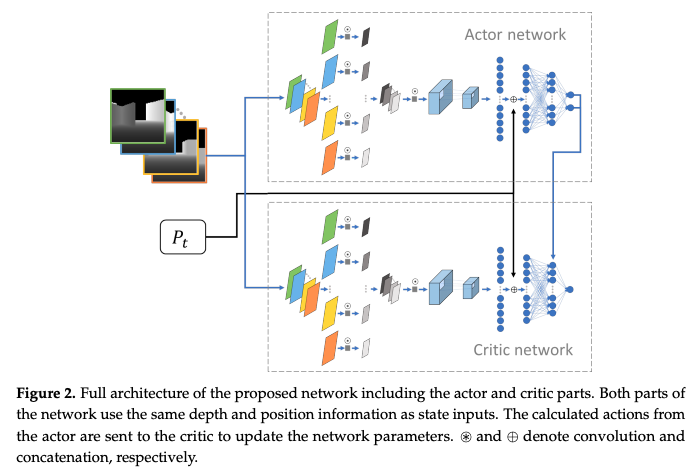
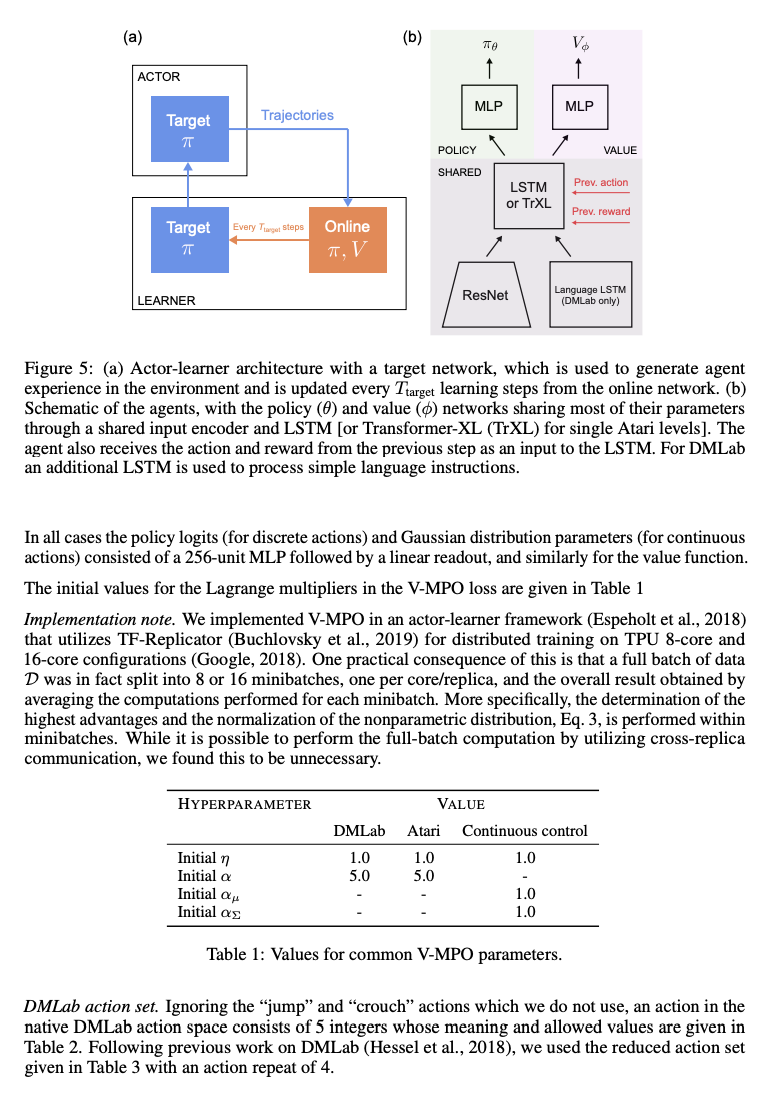
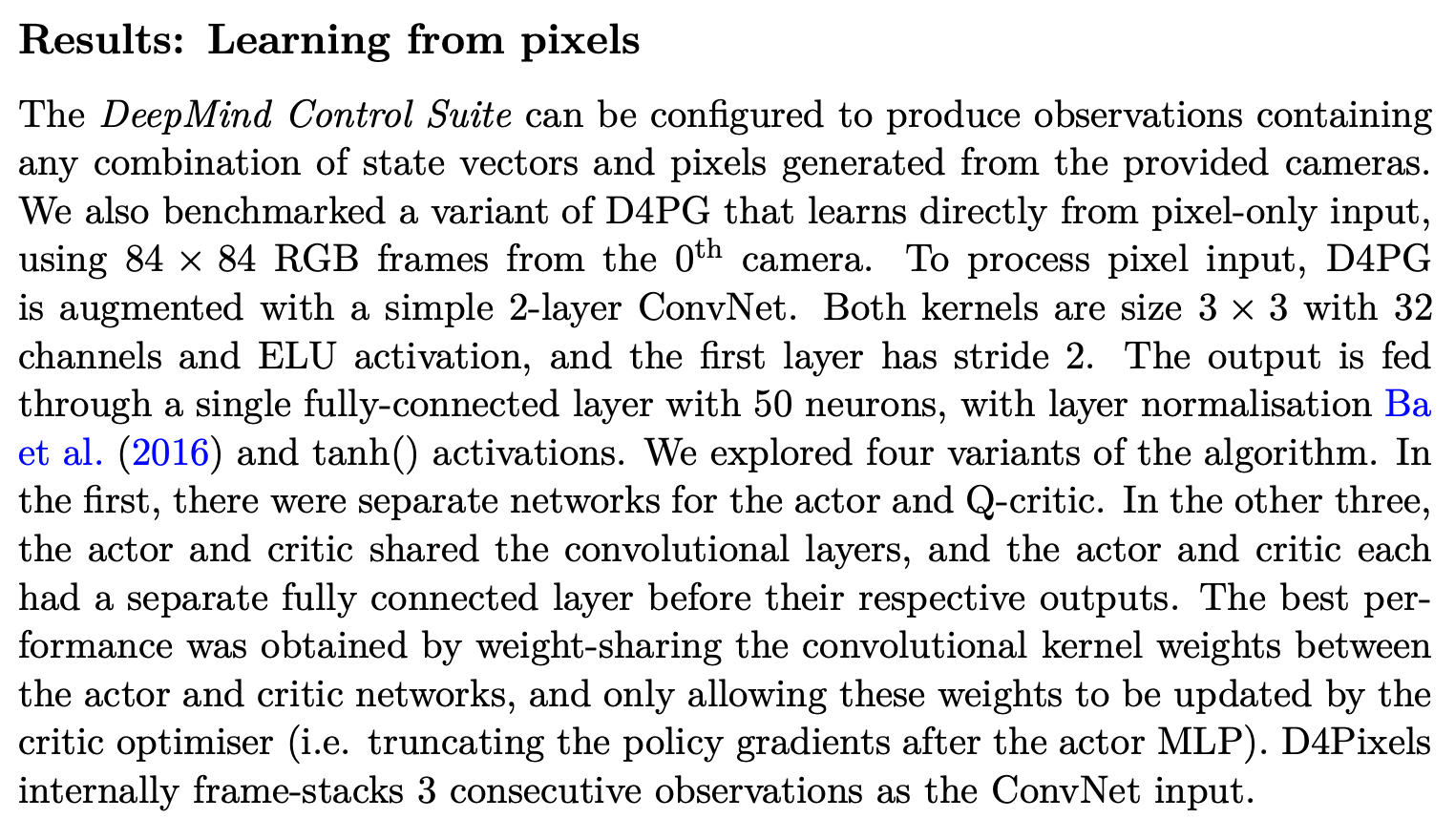
- SAC のような形で、完全に actor と critic でネットワークを分けて CNN を2つ利用する
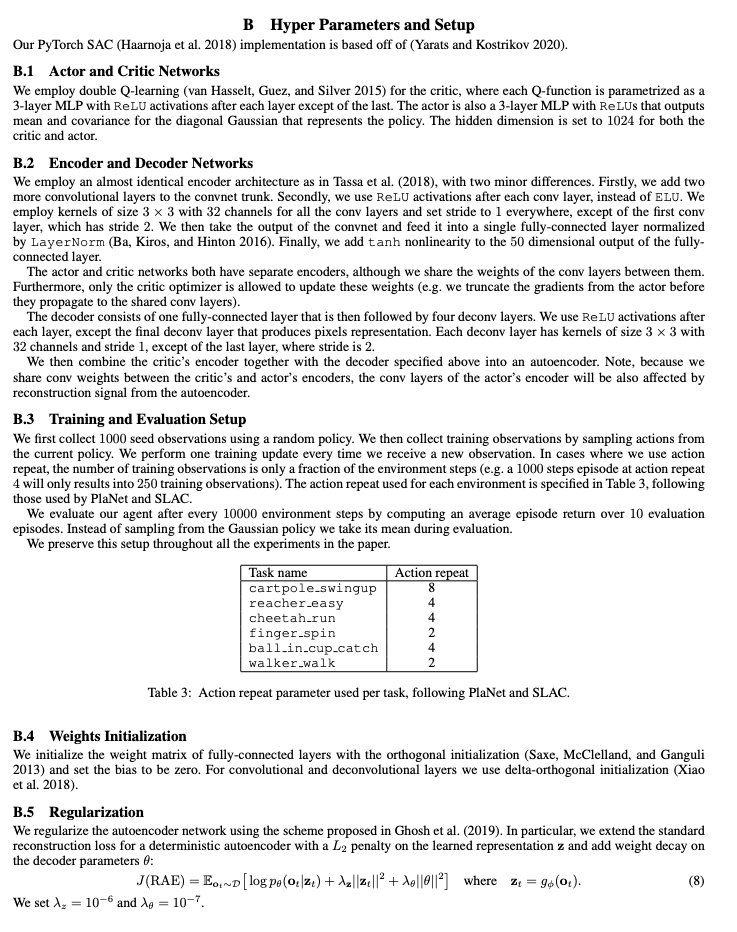
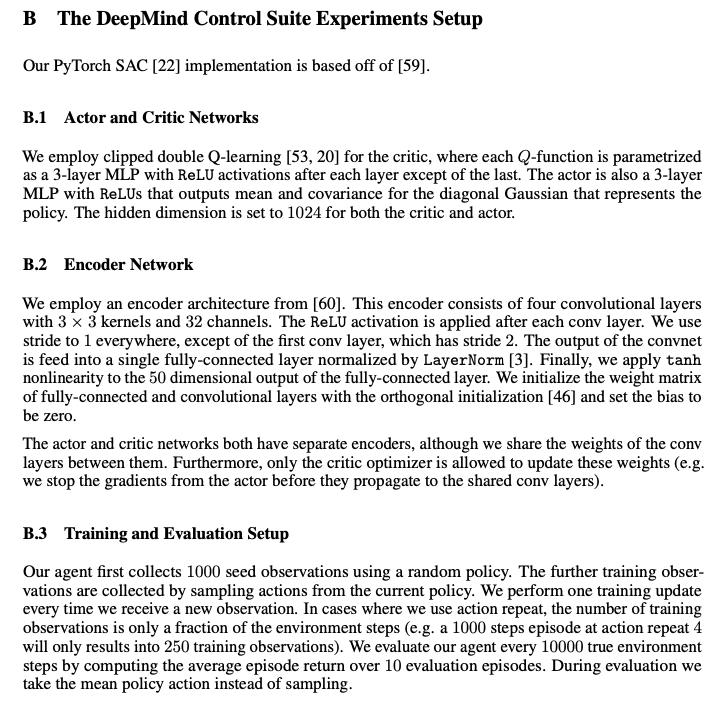
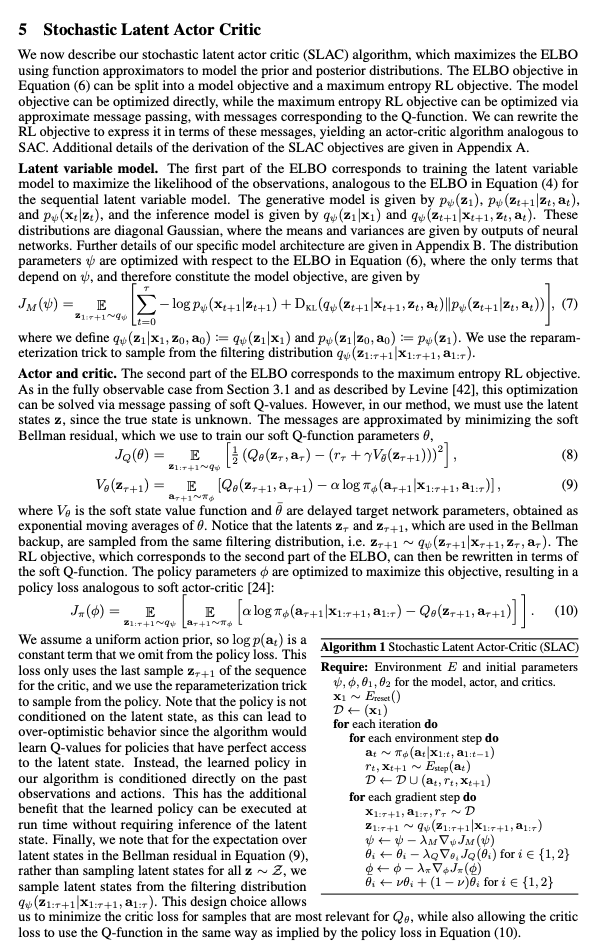
- actor と critic で CNN は共有するが、CNNの更新はcriticでのみしてactorはそれを利用する
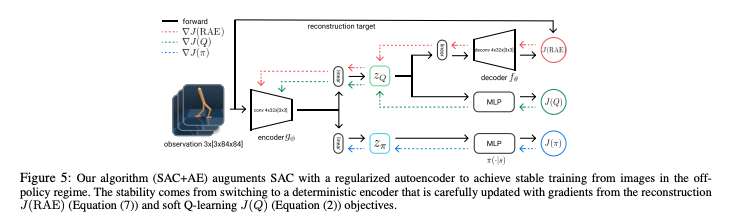
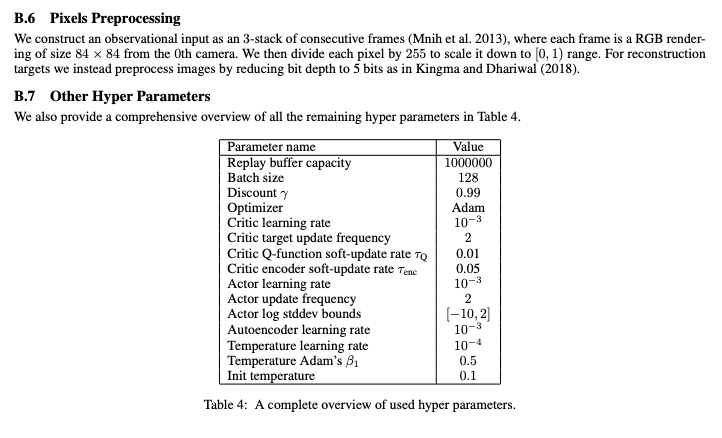
- actor と critic で CNN を利用するが、CNNの更新はAuto encoderなど別のLossをつかう




Haarnoja, Tuomas, et al. "Soft actor-critic algorithms and applications." arXiv preprint arXiv:1812.05905 (2018).
SAC の応用論文
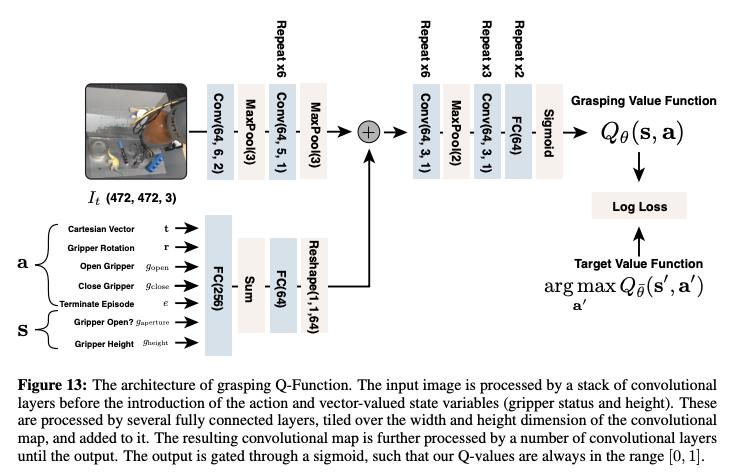
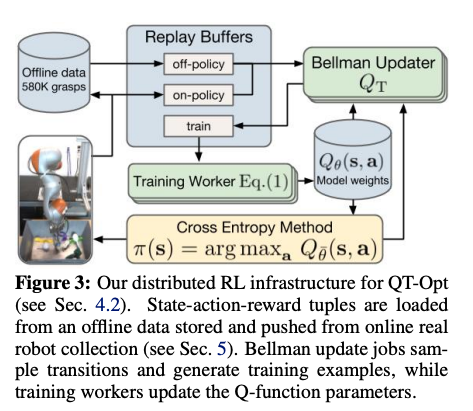
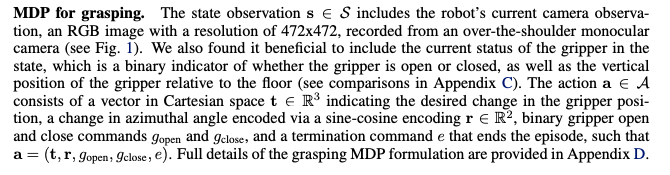
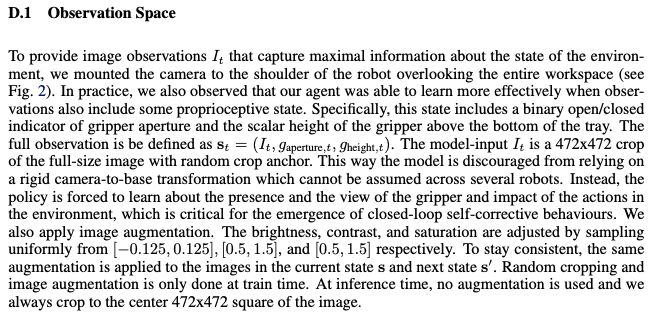
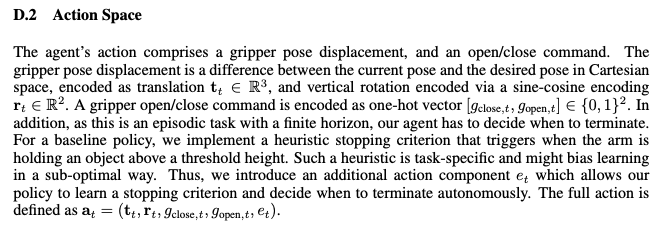
マニピュレーションタスクを画像で解かせている